Selected Publications
(* equal contribution, † corresponding author.)
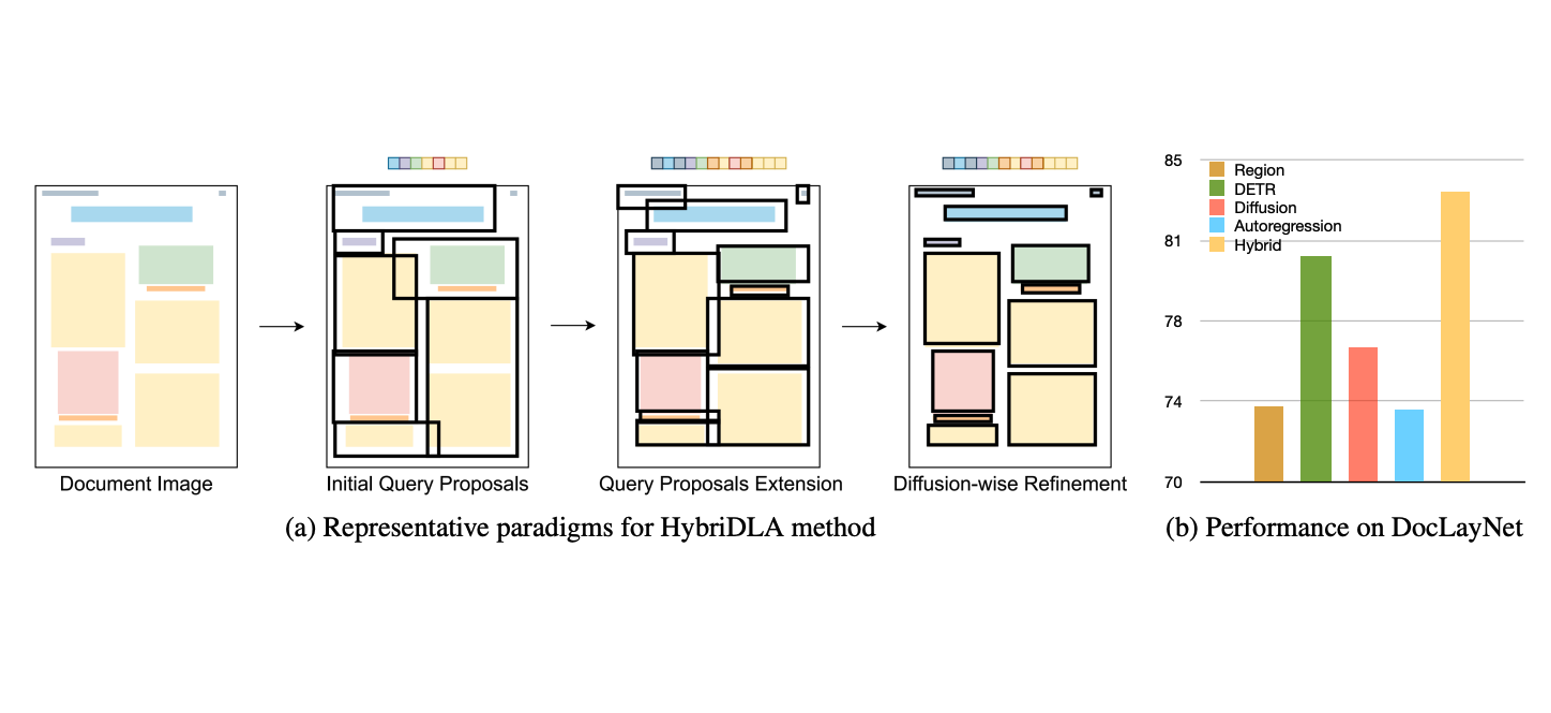
HybriDLA: Hybrid Generation for Document Layout Analysis
Y. Chen, O. Moured, R. Liu, J. Zheng, K. Peng, J. Zhang†, R. Stiefelhagen
AAAI 2026 (🏆 Oral) Project page Paper Code
Y. Chen, O. Moured, R. Liu, J. Zheng, K. Peng, J. Zhang†, R. Stiefelhagen
AAAI 2026 (🏆 Oral) Project page Paper Code
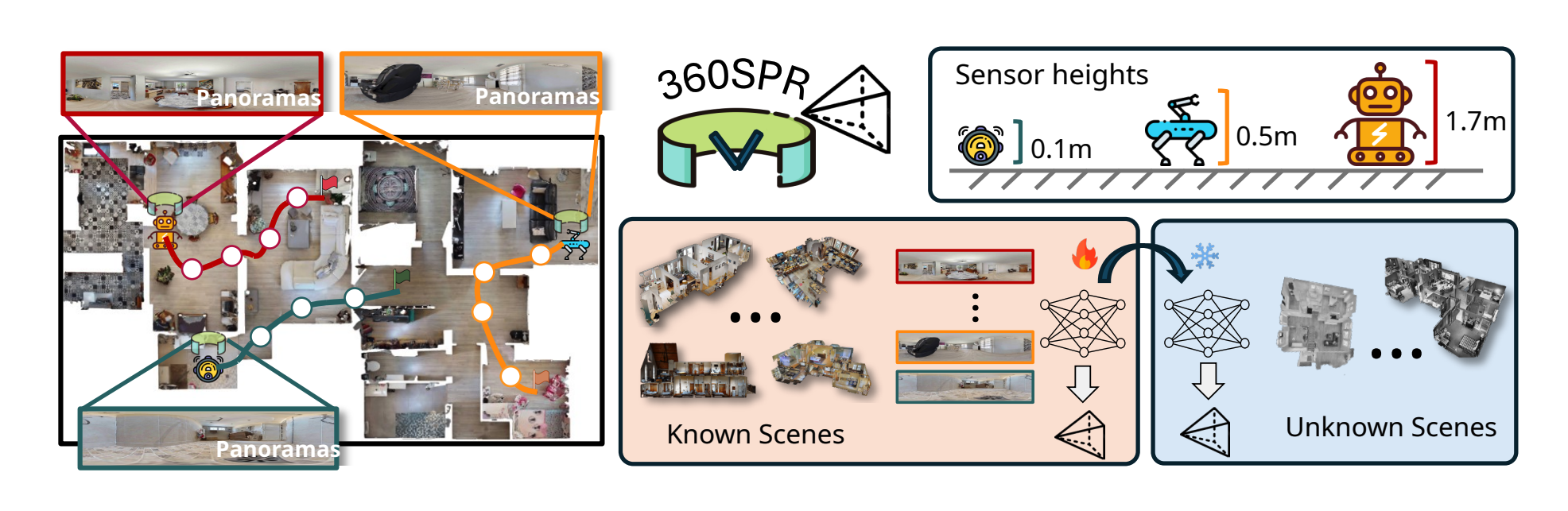
Scene-agnostic Pose Regression for Visual Localization
J. Zheng, R. Liu, Y. Chen, Z. Chen, K. Yang, J. Zhang†, R. Stiefelhagen
CVPR 2025 Project page Paper Code
J. Zheng, R. Liu, Y. Chen, Z. Chen, K. Yang, J. Zhang†, R. Stiefelhagen
CVPR 2025 Project page Paper Code
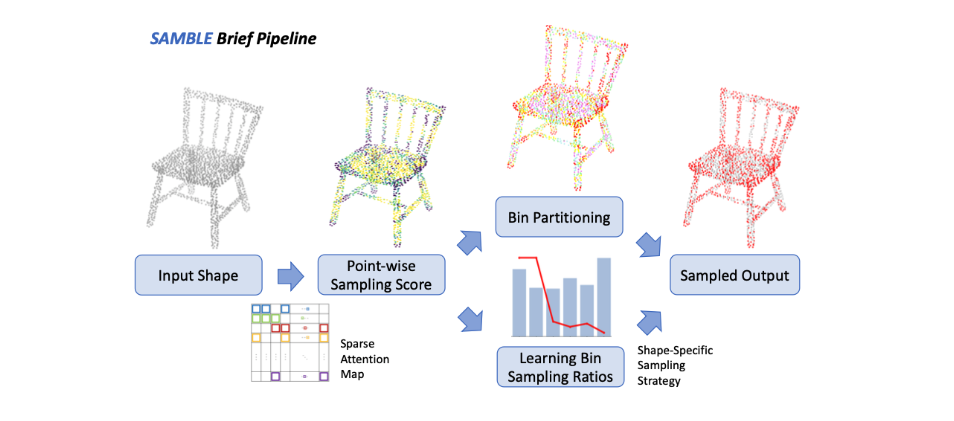
SAMBLE: Shape-Specific Point Cloud Sampling for an Optimal Trade-Off Between Local Detail and Global Uniformity
C. Wu, Y. Wan*, H. Fu*, J. Pfrommer, Z. Zhong, J. Zheng†, J. Zhang, J. Beyerer
CVPR 2025 Project page Paper Code
C. Wu, Y. Wan*, H. Fu*, J. Pfrommer, Z. Zhong, J. Zheng†, J. Zhang, J. Beyerer
CVPR 2025 Project page Paper Code
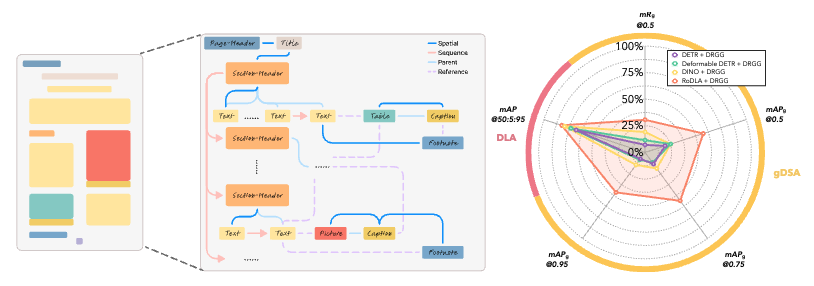
GraphDoc: A Graph-based Document Structure Analysis
Y. Chen, R. Liu, J. Zheng, D. Wen, K. Peng, J. Zhang†, R. Stiefelhagen
ICLR 2025 Project page Paper Code
Y. Chen, R. Liu, J. Zheng, D. Wen, K. Peng, J. Zhang†, R. Stiefelhagen
ICLR 2025 Project page Paper Code
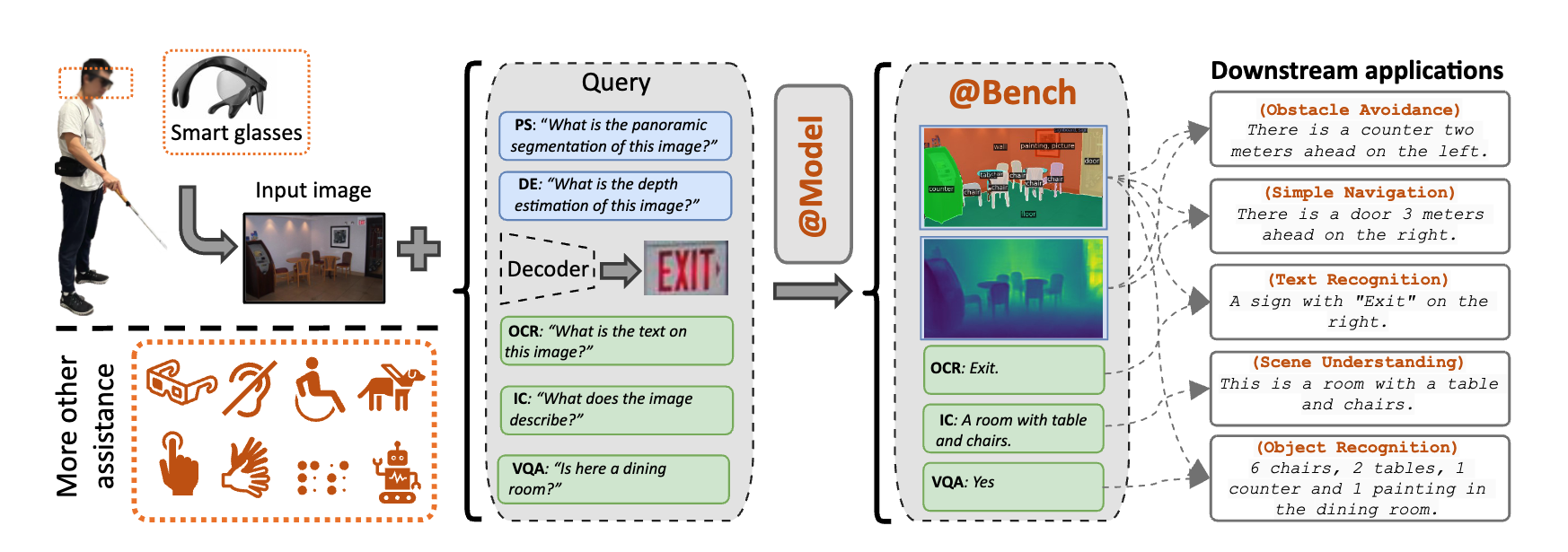
@Bench: Benchmarking Vision-Language Models for Human-centered Assistive Technology
X. Jiang*, J. Zheng*, R. Liu, J. Li, J. Zhang†, S. Matthiesen, R. Stiefelhagen
WACV 2025 Project page Paper Code
X. Jiang*, J. Zheng*, R. Liu, J. Li, J. Zhang†, S. Matthiesen, R. Stiefelhagen
WACV 2025 Project page Paper Code
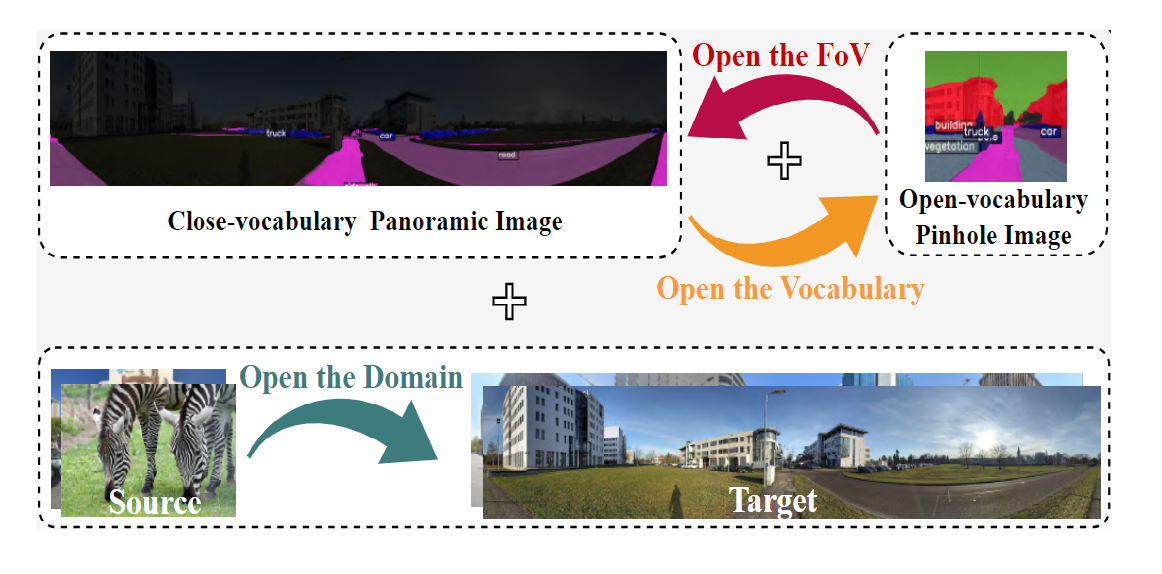
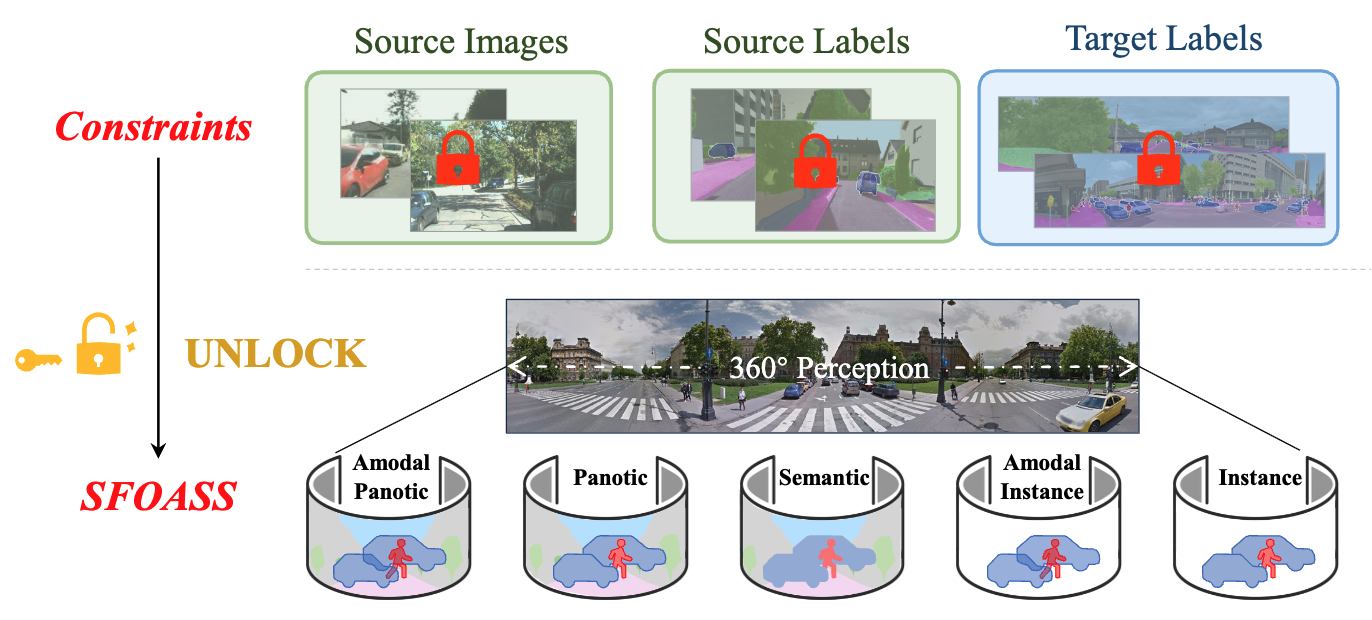
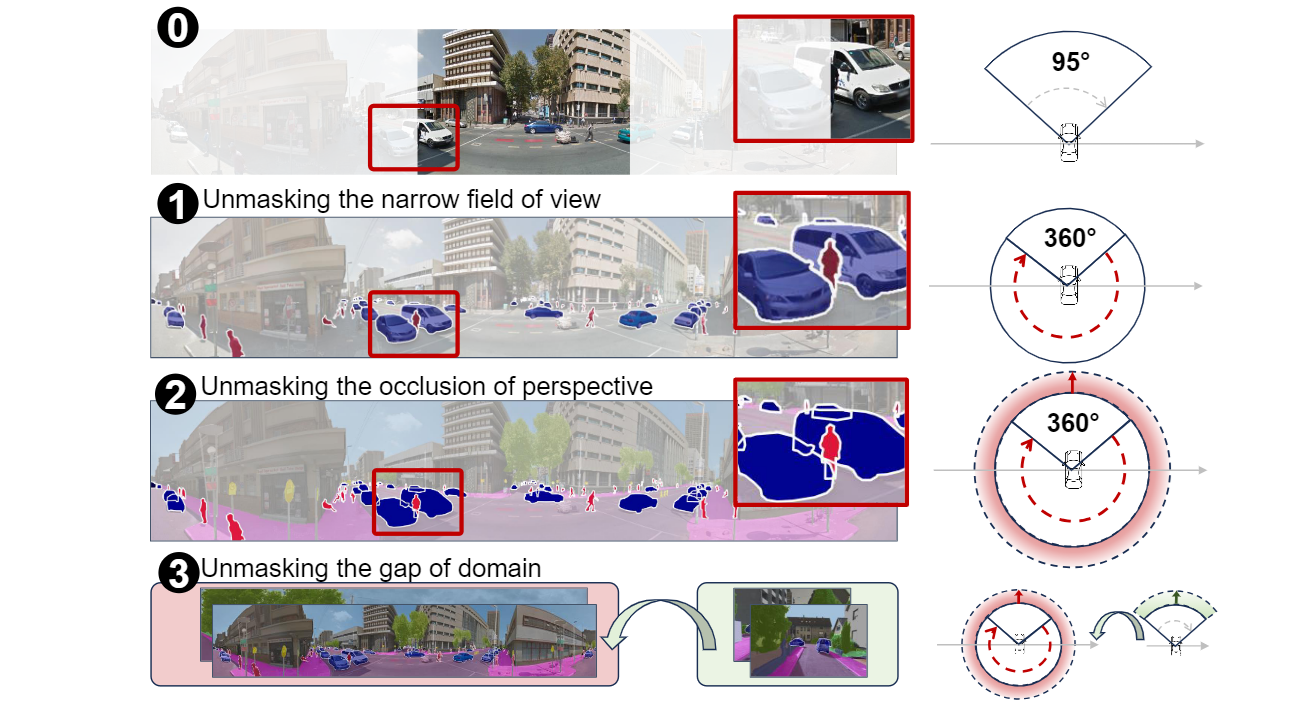
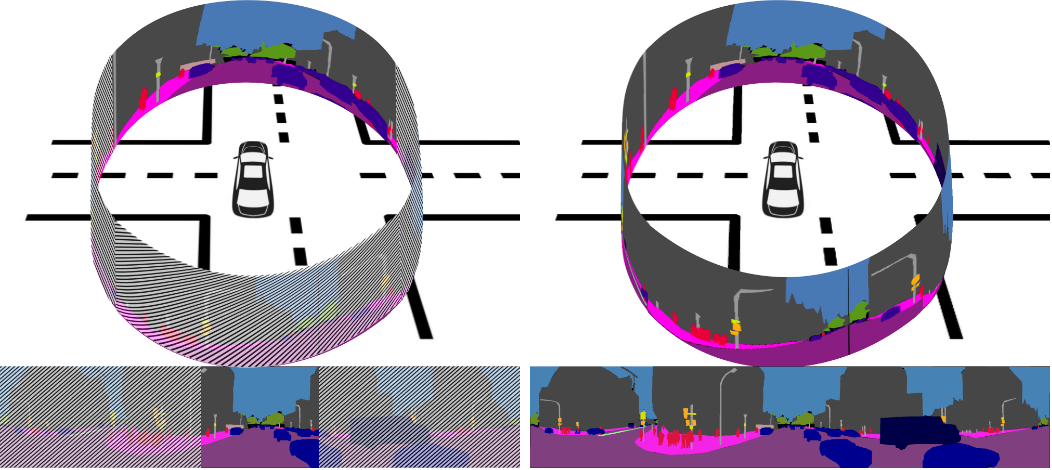
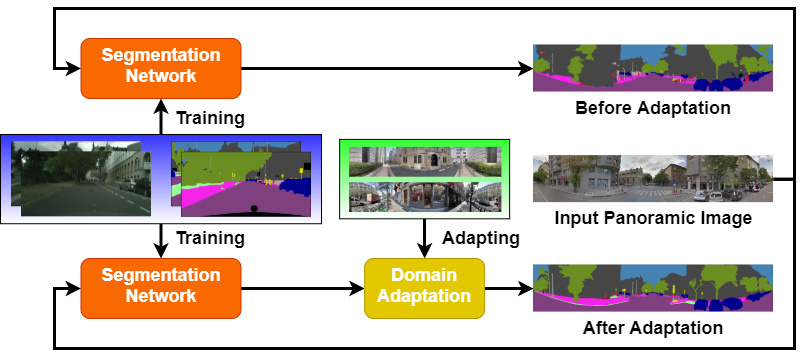
Open Panoramic Segmentation
J. Zheng, R. Liu, Y. Chen, K. Peng, C. Wu, K. Yang, J. Zhang†, R. Stiefelhagen.
ECCV 2024 Project page Paper Code
J. Zheng, R. Liu, Y. Chen, K. Peng, C. Wu, K. Yang, J. Zhang†, R. Stiefelhagen.
ECCV 2024 Project page Paper Code
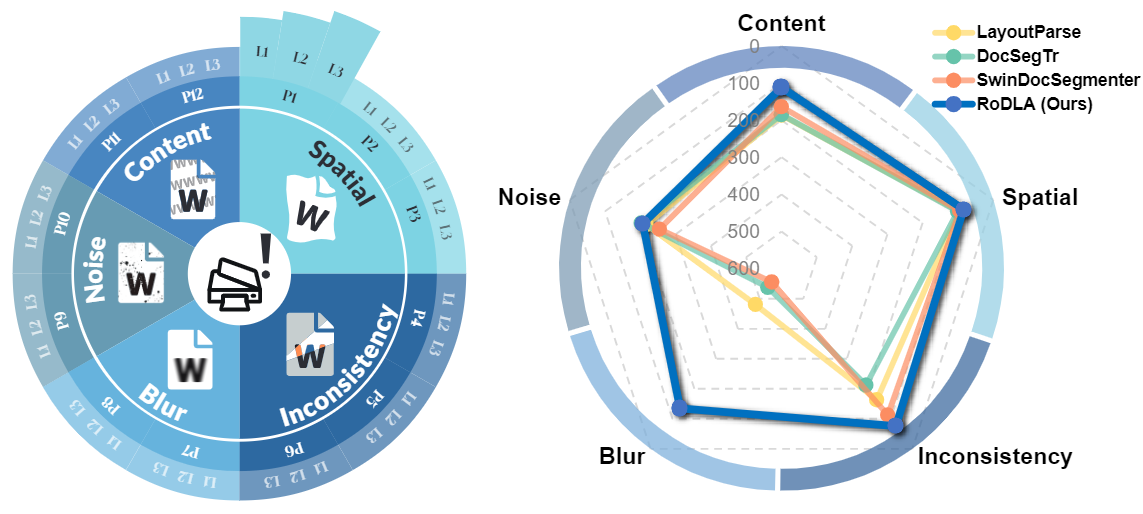
RoDLA: Benchmarking the Robustness of Document Layout Analysis Models
Y. Chen, J. Zhang†, K. Peng, J. Zheng, R. Liu, P. Torr, R. Stiefelhagen.
CVPR 2024 Project page Paper Code
Y. Chen, J. Zhang†, K. Peng, J. Zheng, R. Liu, P. Torr, R. Stiefelhagen.
CVPR 2024 Project page Paper Code
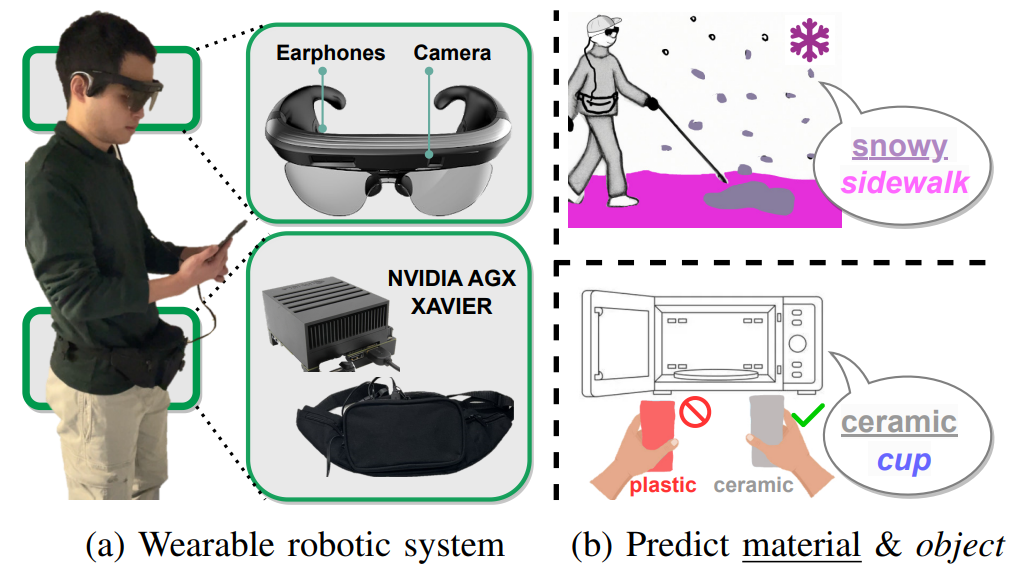
MateRobot: Material Recognition in Wearable Robotics for People with Visual
Impairments
J. Zheng*, J. Zhang*, K. Yang, K. Peng, R. Stiefelhagen.
ICRA 2024 (🏆 Best paper finalist on HRI) Project page Paper Code
J. Zheng*, J. Zhang*, K. Yang, K. Peng, R. Stiefelhagen.
ICRA 2024 (🏆 Best paper finalist on HRI) Project page Paper Code
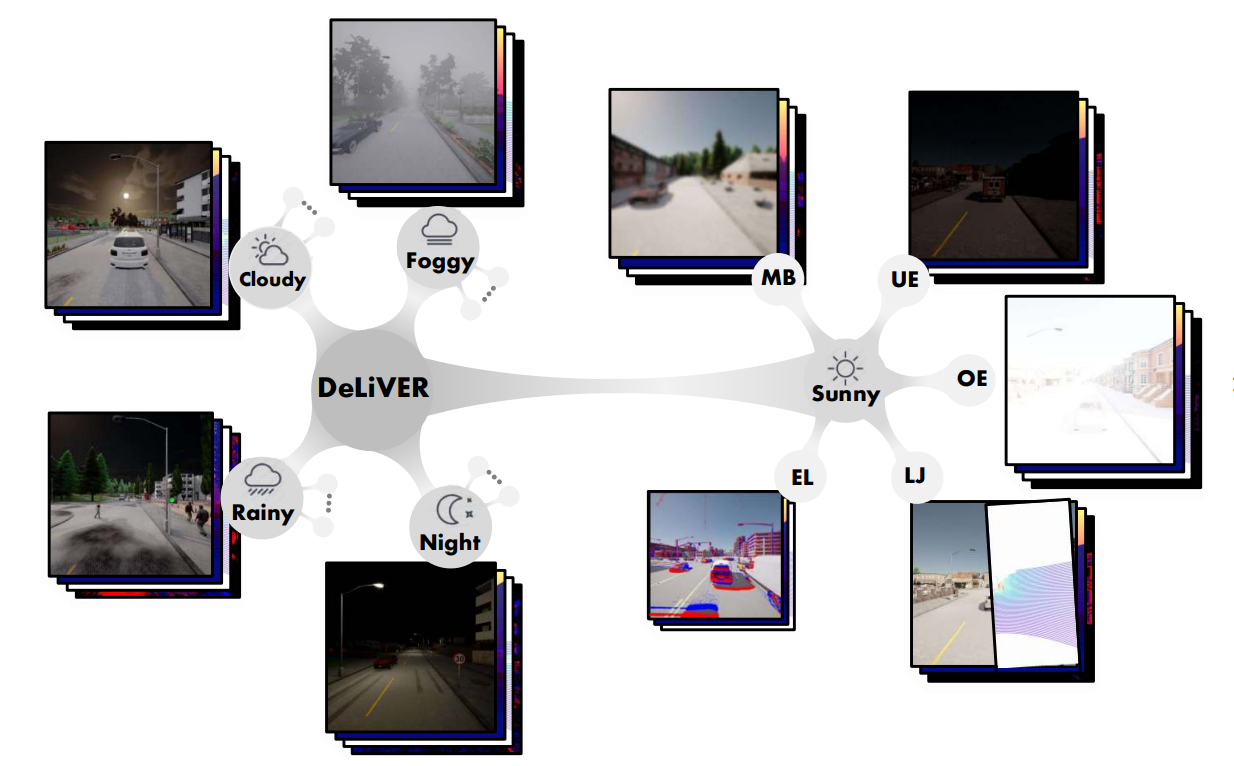
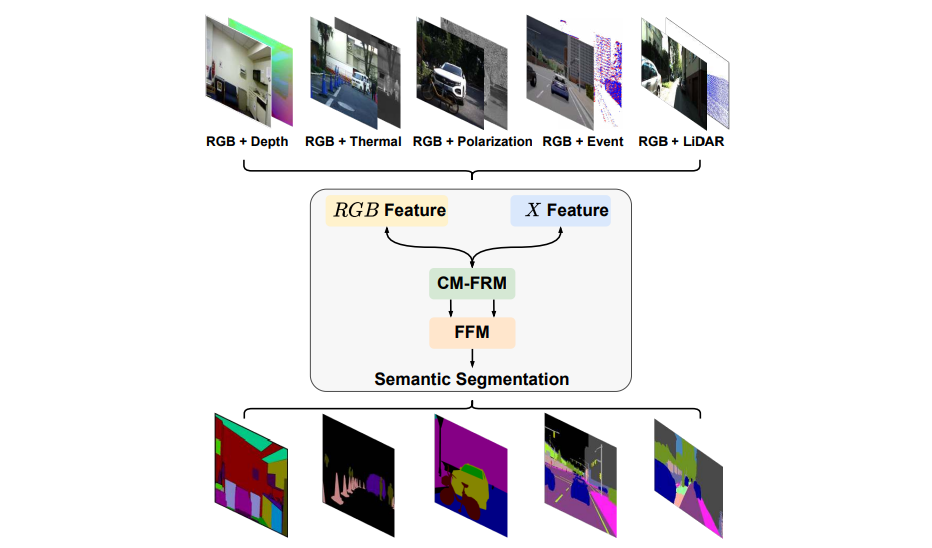
Delivering Arbitrary-Modal Semantic Segmentation
J. Zhang*, R. Liu*, S. Hao, K. Yang, S. Reiß, K. Peng, H. Fu, K. Wang, R. Stiefelhagen.
CVPR 2023 Project page Paper Code Dataset
J. Zhang*, R. Liu*, S. Hao, K. Yang, S. Reiß, K. Peng, H. Fu, K. Wang, R. Stiefelhagen.
CVPR 2023 Project page Paper Code Dataset
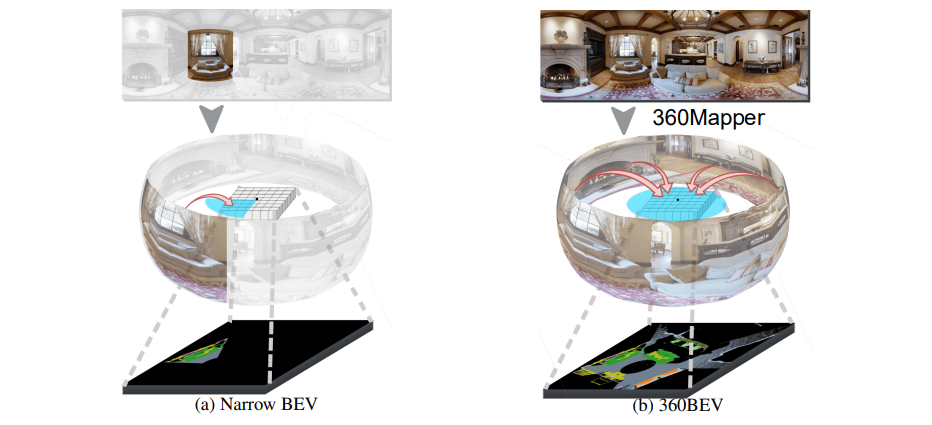
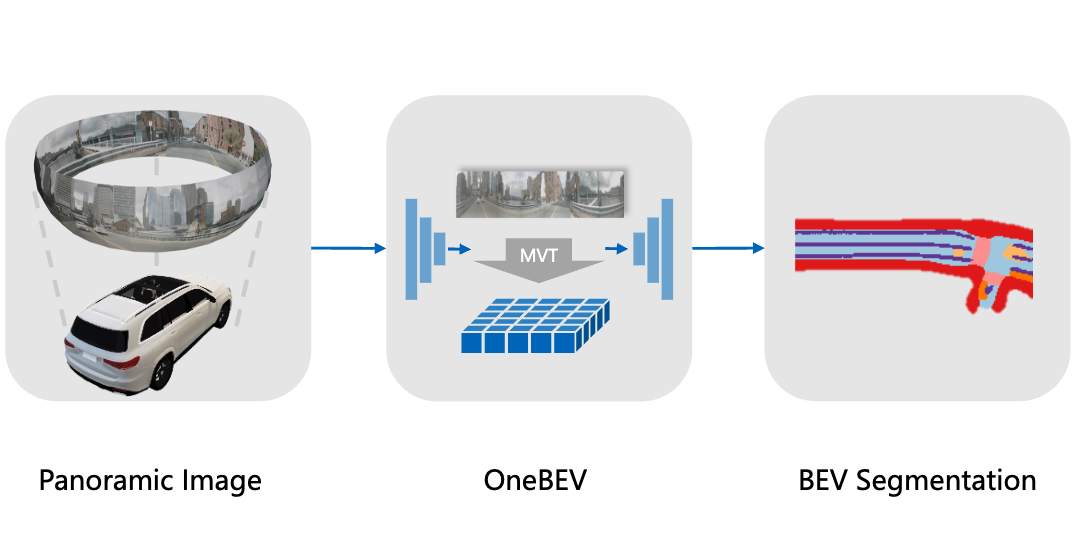
360BEV: Panoramic Semantic Mapping for Indoor Bird's-Eye View
Z. Teng*, J. Zhang*†, K. Yang, K. Peng, H. Shi, S. Reiß, K. Cao, R. Stiefelhagen.
WACV 2024 Project page Paper Code Dataset
Z. Teng*, J. Zhang*†, K. Yang, K. Peng, H. Shi, S. Reiß, K. Cao, R. Stiefelhagen.
WACV 2024 Project page Paper Code Dataset
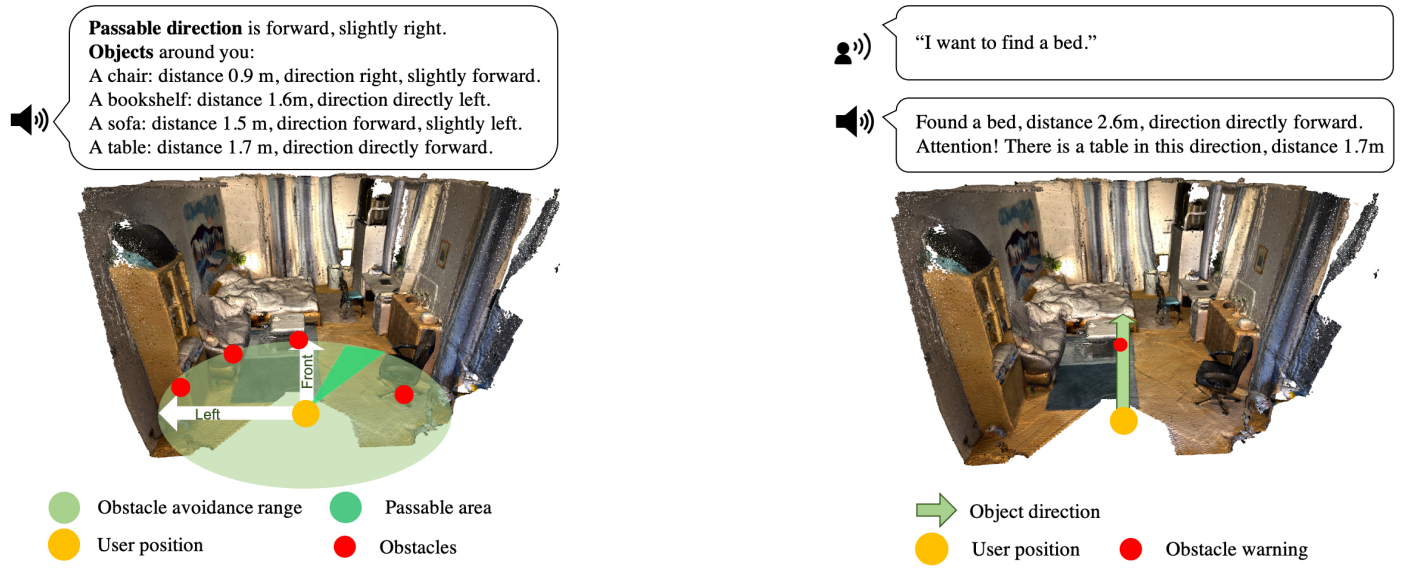
HIDA: Towards Holistic Indoor Understanding for the Visually Impaired via Semantic
Instance Segmentation with a Wearable Solid-State LiDAR Sensor
H. Liu, R. Liu, K. Yang, J. Zhang, K. Peng, R. Stiefelhagen
ICCV Workshop on Assistive Computer Vision and Robotics ( ACVR) 2021 Paper
H. Liu, R. Liu, K. Yang, J. Zhang, K. Peng, R. Stiefelhagen
ICCV Workshop on Assistive Computer Vision and Robotics ( ACVR) 2021 Paper

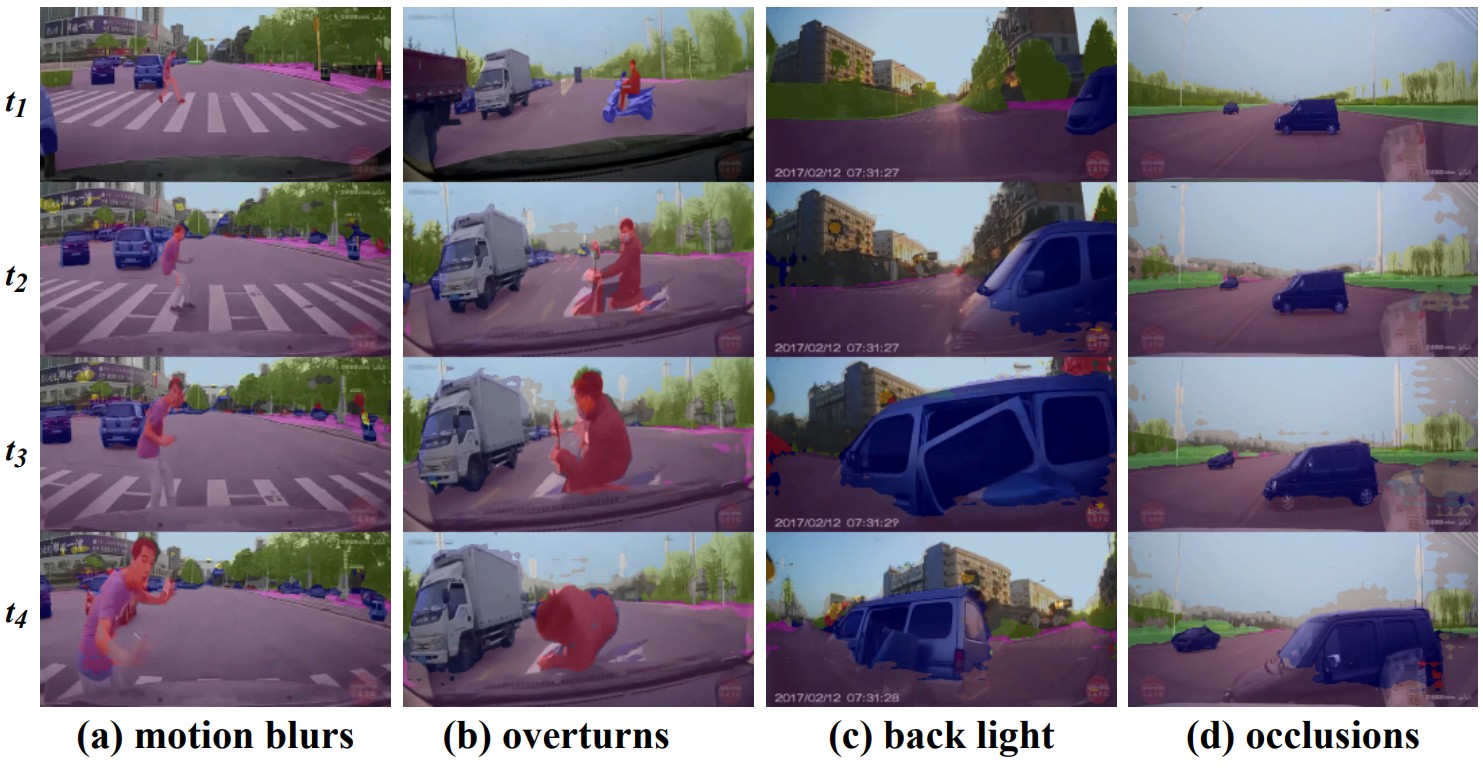
Perception Framework through Real-Time Semantic Segmentation and Scene Recognition
on a Wearable System for the Visually Impaired
Y. Zhang, H. Chen, K. Yang, J. Zhang, R. Stiefelhagen
IEEE RCAR 2021 Paper
Y. Zhang, H. Chen, K. Yang, J. Zhang, R. Stiefelhagen
IEEE RCAR 2021 Paper